VinRobotics Officially Launches the VinRobotics Humanoid Platform and Open-Source Ecosystem
The VinRobotics Humanoid Platform combines our latest high-end humanoid robots VR-H5 and mid-range humanoid robots VR-M3, with publicly available open-source repositories designed to support the global technology community in advancing humanoid robotics research, development, and real-world deployment.

What is the VinRobotics Humanoid Platform?
The VinRobotics Humanoid Platform combines our commercial humanoid robotics hardware with an ecosystem of SDKs, APIs, technical documentation, development tools, and opensource repos, helping shorten the path from platform adoption to building and deploying real-world applications.
The platform is built on open standards such as ROS 2, MuJoCo, Isaac Lab, and LeRobot, and is developed based on real-world deployment experience and operational data from manufacturing environments in Vietnam.
Through this approach, the VinRobotics Humanoid Platform is designed to enable flexible integration, rapid deployment, and cost-efficient development, expanding access to humanoid robotics technologies for a broader range of partners and organizations.
What is included in the initial open-source release?
Alongside the platform launch, we are releasing our first two open-source repositories to support the optimization and deployment of AI models on humanoid robots.
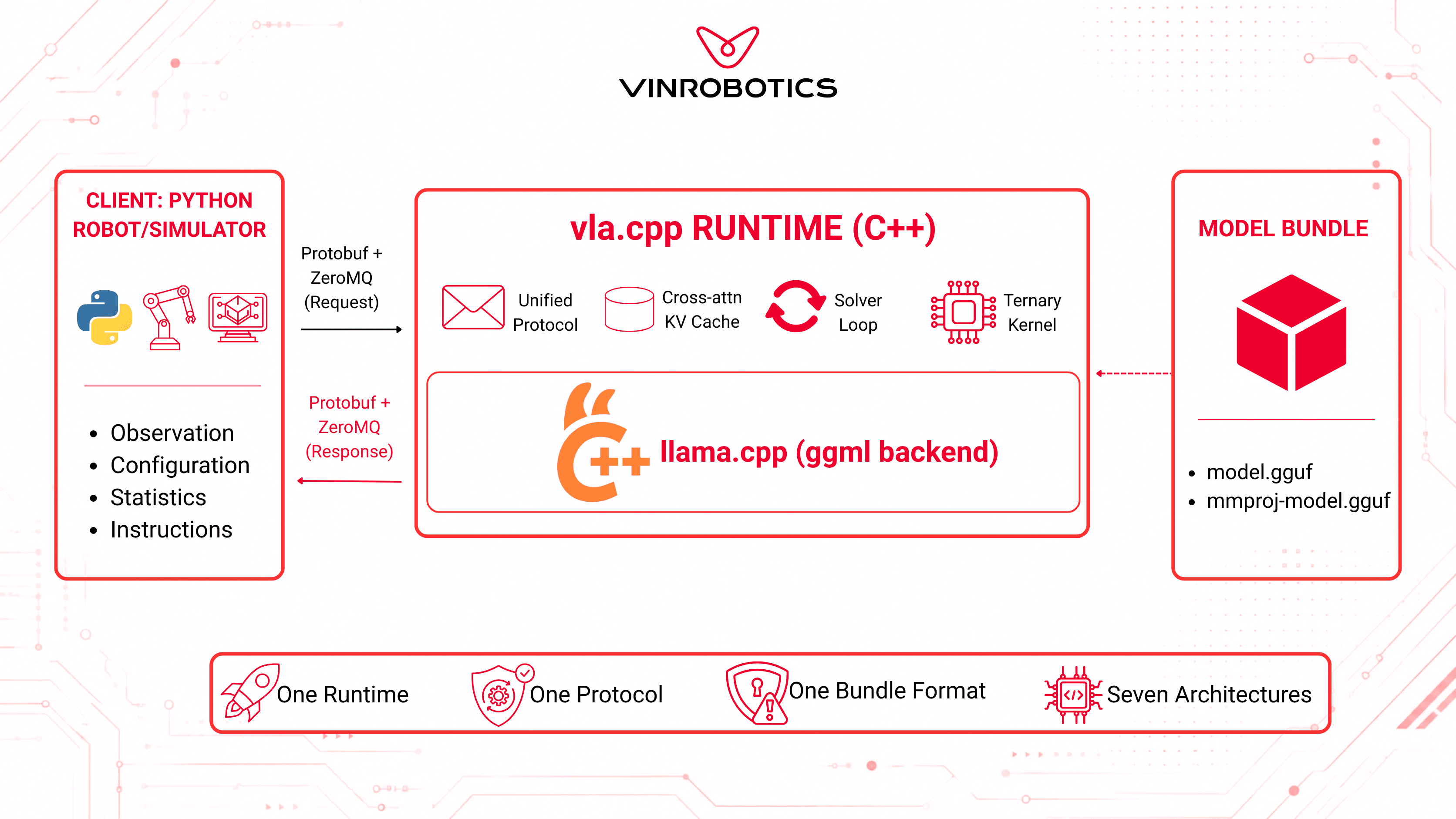
vla.cpp is a portable, lightweight runtime for running Vision-Language-Action (VLA) models. Modern humanoid robots rely on VLA models to understand their surroundings, interpret instructions, and generate actions. However, deploying these models efficiently on robotic hardware remains a challenge due to latency and computing requirements.
vla.cpp enables robots to run these models directly on-device with low latency and minimal hardware requirements, without the need for a bulky software stack. This helps make robot intelligence faster, more efficient, and easier to deploy in real-world environments.
model-quantization-recipes provide a collection of practical workflows for compressing large VLA and robot policy models. Large AI models often require substantial memory and computational resources, creating barriers for researchers and developers working with limited hardware.
model-quantization-recipes provide practical methods for reducing model size and compute requirements while maintaining performance, making it easier to run powerful robotics models on more affordable and widely available hardware.
In addition, we are releasing optimized model weights through our Hugging Face organization to support research, experimentation, and evaluation by the broader community.
Upcoming releases
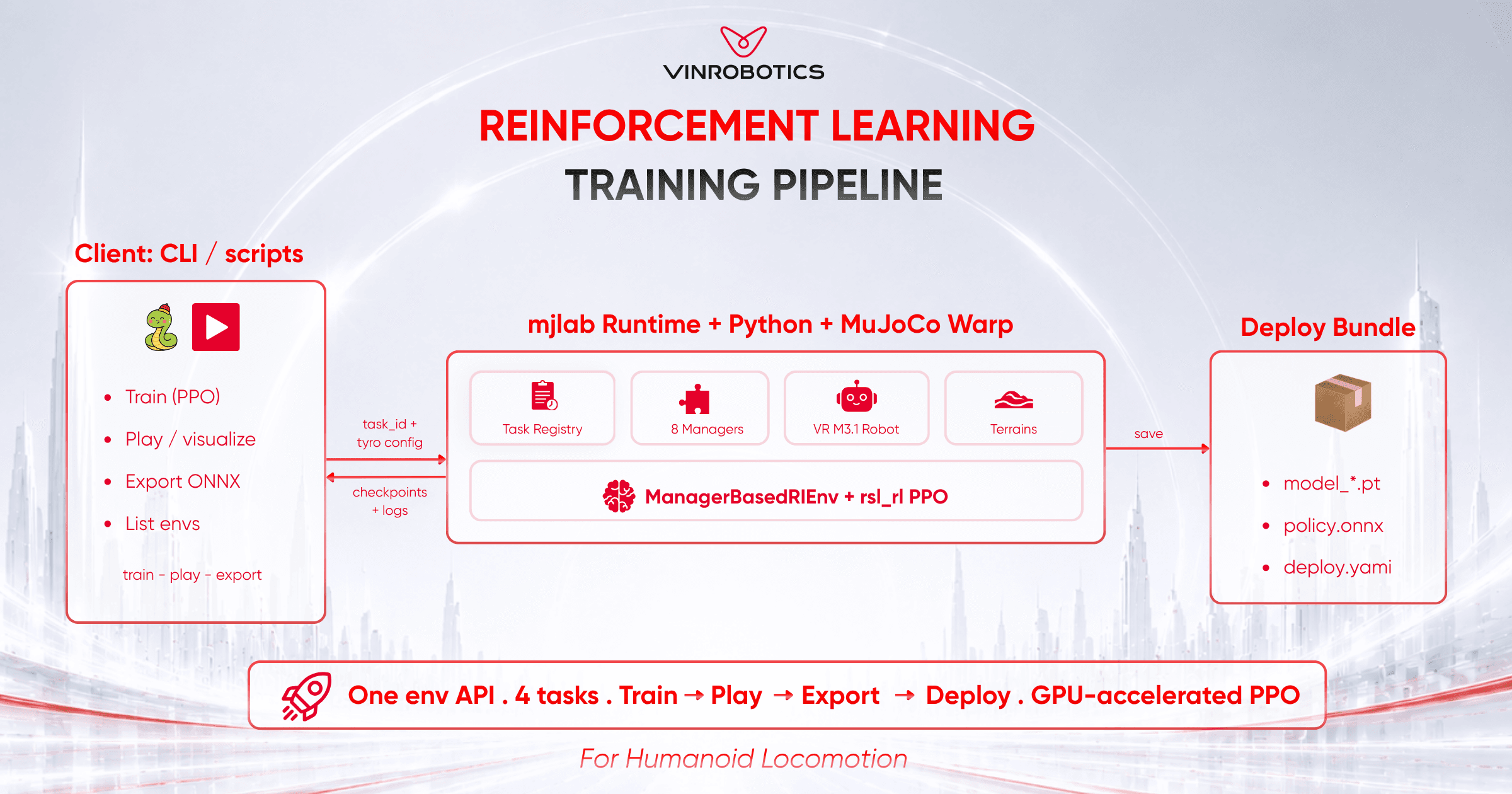
In the coming months, we plan to further expand our open-source ecosystem with the release of the Reinforcement Learning Training Pipeline and the URDF model of the VR-M3 humanoid robot.
These resources will support training, simulation, and reproducible research, while enabling developers to continue building and extending humanoid robotics applications on the VinRobotics platform.
Through the VinRobotics Humanoid Platform and our accompanying open-source ecosystem, we aim to foster a more open robotics community, encourage collaboration, and accelerate the advancement of humanoid robotics and embodied/physical AI.
🔗 Explore the releases now:
• github.com/VinRobotics/vla.cpp
• github.com/VinRobotics/model-quantization-recipes
• huggingface.co/vrfai
Explore our latest products: https://vinrobotics.net/product
Related News