VinRobotics Open-Sources a Reinforcement Learning Training Pipeline for Humanoid Locomotion
Teaching a humanoid to walk, balance, and move over varied terrain is one of the core problems in humanoid robotics. To support more open and reproducible research, VinRobotics is sharing an end-to-end Reinforcement Learning (RL) training pipeline with the community, enabling others to train, reproduce, and build on our platform.
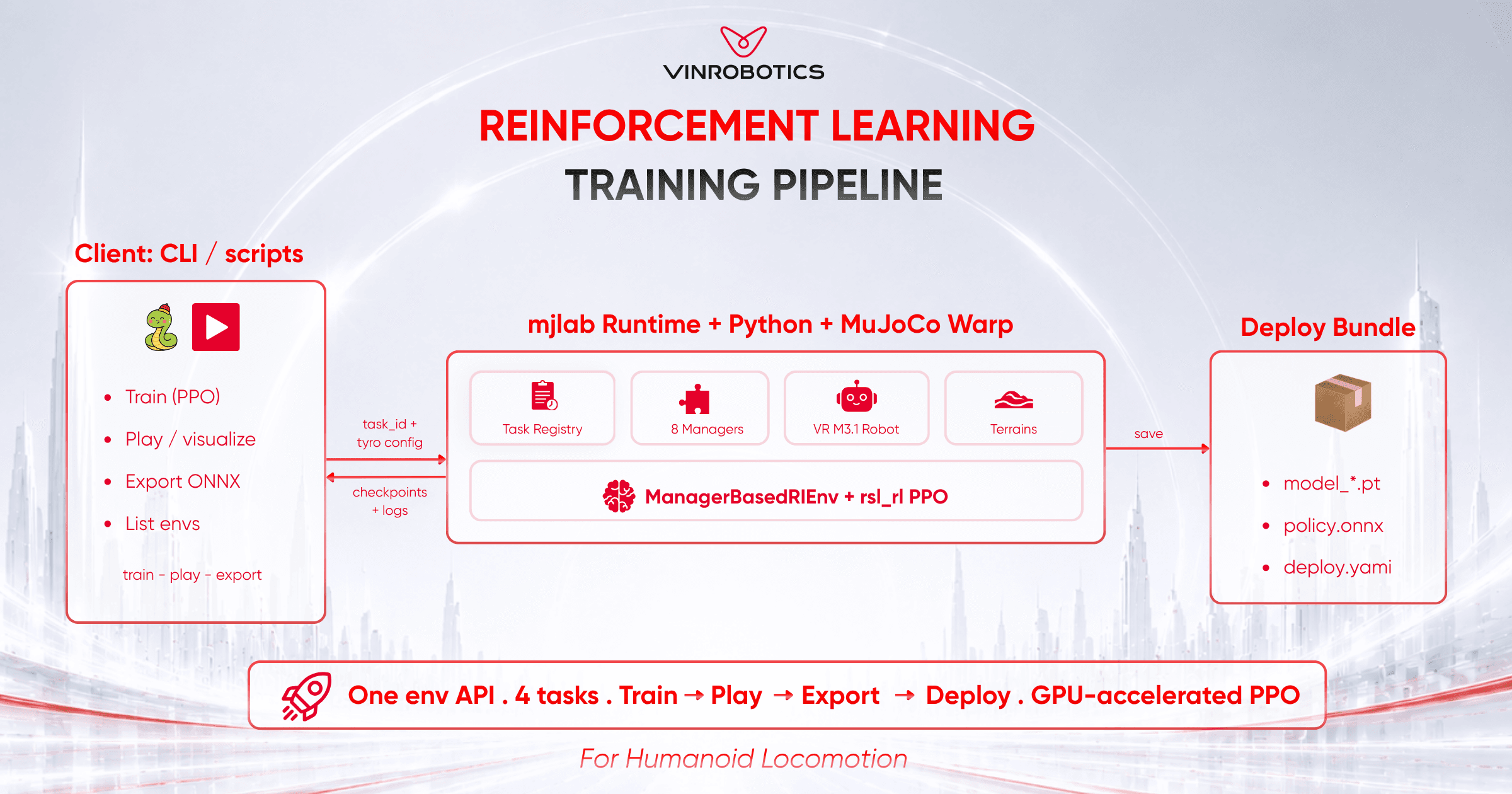
What It Is
The pipeline is built on mjlab, using MuJoCo as the physics backend. Combining a proven training API with GPU-accelerated simulation, it provides a clean and modular framework for locomotion learning while remaining fast and accessible.
Key Capabilities
Train → Play Workflow
A simple and reproducible loop where a control policy is trained in simulation through reward optimization and then replayed to verify behavior. This lowers the barrier for researchers to go from idea to working policy.
Velocity-Tracking Tasks on Flat and Rough Terrain
Ready-to-run tasks for both full-body and 12-DOF lower-body control let others start from working baselines instead of building from scratch.
Massively Parallel, Multi-GPU Training
Thousands of environments simulated in parallel and scalable across GPUs enable faster experimentation and shorter time to results.
Deployment-Ready Policy Export
Trained policies export directly to ONNX for sim-to-sim and sim-to-real deployment, helping close the loop from training to the real robot.
Contributing Back to the Open-Source Community
This work builds on the excellent open-source efforts of the mjlab, MuJoCo, rsl_rl, and Unitree RL communities, and we are glad to contribute back.
Join us in advancing open humanoid robotics! Feedback, contributions, and collaboration are always welcome.
✨ Repository, documentation, and source code:
👉 RL training: https://github.com/VinRobotics/vinrobotics_mjlab
👉 RL deploy: https://github.com/VinRobotics/vinrobotics_mjlab_deploy
Related News



