Người máy của VinRobotics đạt vận tốc di chuyển ngang con người
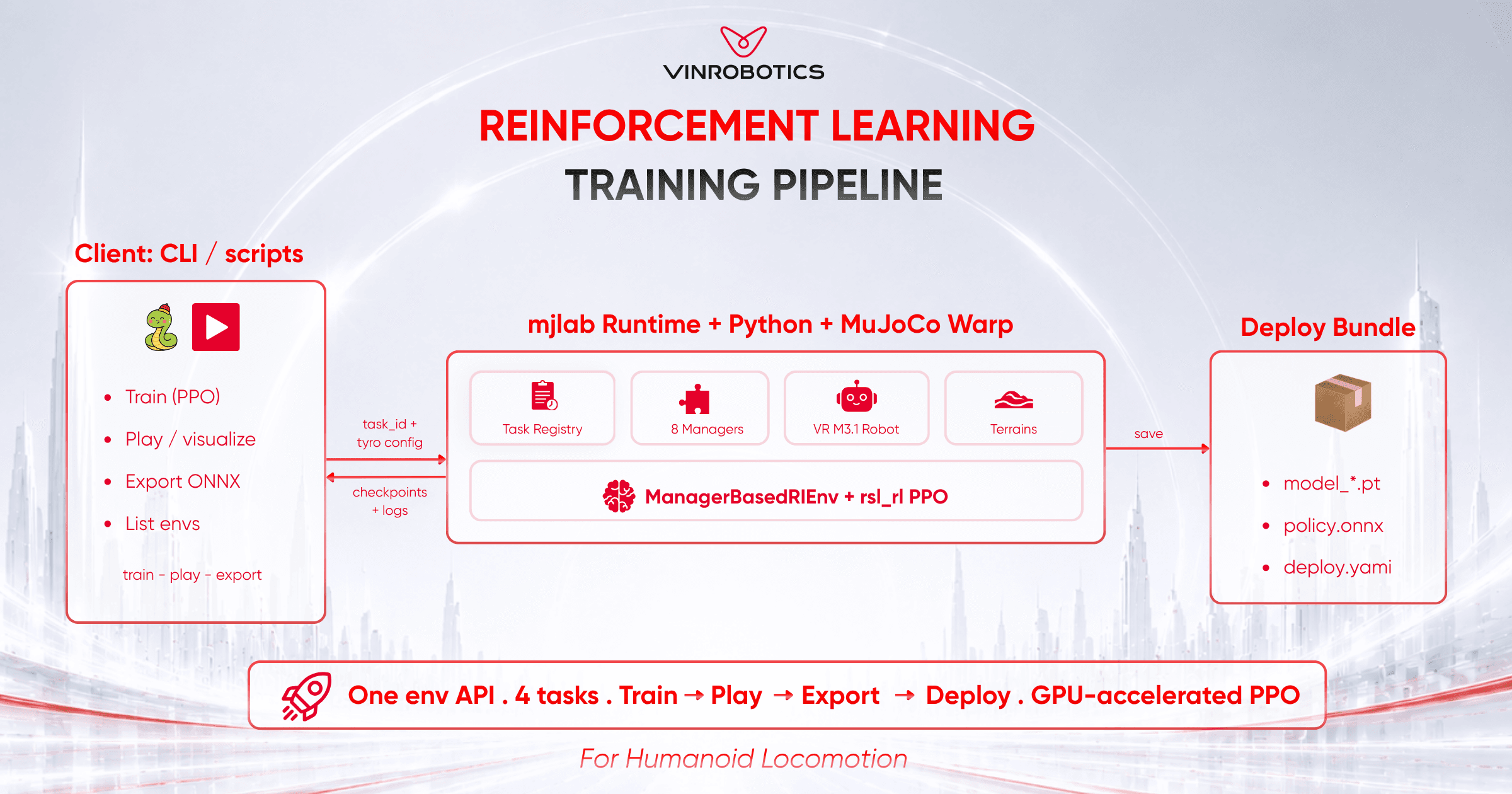
Các kỹ sư VinRobotics ứng dụng công nghệ locomotion dựa trên Reinforcement Learning (RL) để huấn luyện robot humanoid có khả năng di chuyển ổn định và tự nhiên, ngay cả trên các nền tảng có kích thước lớn và khối lượng nặng

Những bước tiến này được xây dựng dựa trên ba trụ cột cốt lõi:
1. Thiết kế phần thưởng cho dáng đi (Gait reward design – phase-aware, bio-inspired)
Đội ngũ đã tái thiết kế mục tiêu huấn luyện chuyển động, tích hợp các tín hiệu về chu kỳ chuyển động và nguyên lý sinh cơ học của con người. Nhờ đó, chính sách điều khiển học được các bước đi mượt mà, hiệu quả và tự nhiên, thay vì chỉ tối ưu cho việc “đi nhanh” hay “không bị ngã”.
2. Domain randomization cho bài toán chuyển giao từ mô phỏng sang thực tế (sim-to-real)
Với việc tự thiết kế toàn bộ cấu trúc vật lý của robot humanoid từ đầu, VinRobotics có thể ngẫu nhiên hóa các tham số động lực học quan trọng. Cách tiếp cận này giúp bộ điều khiển bền vững hơn trước sai số mô hình và các biến động trong môi trường thực, đồng thời nâng cao độ tin cậy khi triển khai ngoài thực tế.
3. Học theo lộ trình (Curriculum learning)
Quá trình huấn luyện được triển khai theo từng giai đoạn, tăng dần độ khó, đồng thời đảm bảo robot làm chủ tốt từng cấp độ về thăng bằng và điều khiển trước khi chuyển sang bước tiếp theo. Đây là yếu tố then chốt giúp duy trì sự ổn định cho một nền tảng humanoid có khối lượng lớn.
Trong video là VR-H3 - dòng người máy cao cấp do VinRobotics phát triển, với chiều cao 178cm và khối lượng 85kg.
Tin liên quan